|
|
|---|
| The MRS UAV System 1.5 is being released and this page needs updating. Please, keep in mind that the information on this page might not be valid. |
Definitions
Path (mrs_msgs/Path.msg)
- An ordered sequence of geometric poses without any notion of time.
- Specifies what poses should the UAV fly through: no control over dynamics.
- Has to be sampled first by sampling period
T. - See below on how to generate dynamically feasible trajectories from paths.
Trajectory (mrs_msgs/TrajectoryReference.msg)
- An ordered time-parametrized sequence of geometric poses.
- Specifies what pose should the UAV be in at given time: more control over dynamics.
- Can be input to the reference tracker.
| Path | Trajectory |
|---|---|
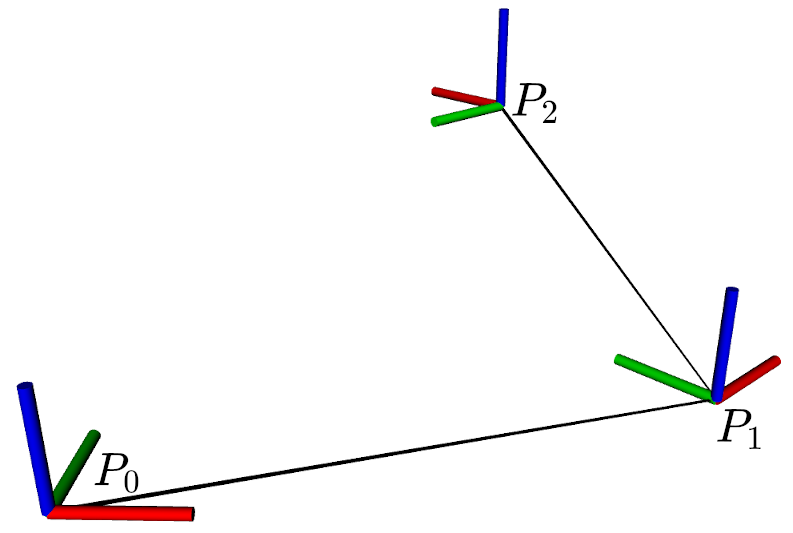 | 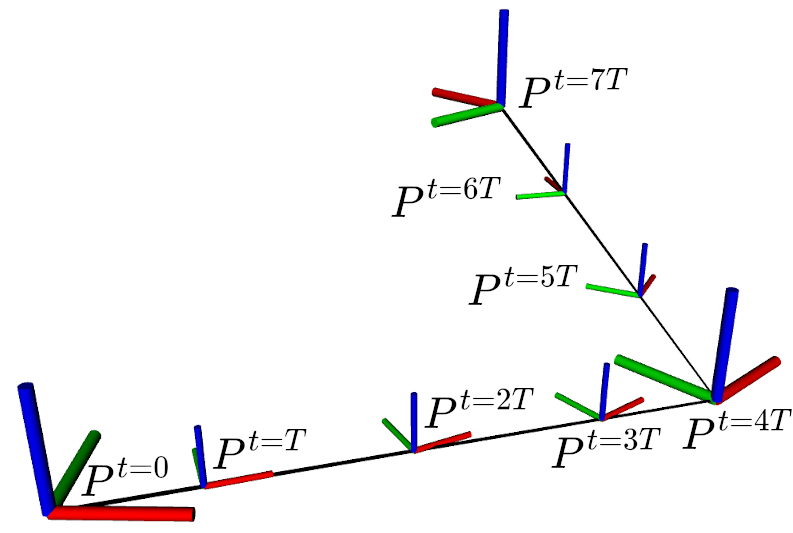 |
Loading trajectories
The mrs-ctu/trajectory_loader package contains all information you need for loading a trajectory from a file: documentation, example trajectories, and launch files. It expects trajectory sampled with period of T = 0.2 s (can be modified in the message), in line-format x,y,z,heading, e.g.,:
0.0,0.0,1.0,0.0
0.2,0.2,1.2,0.1
0.3,0.1,1.4,0.15
The trajectory loaded with mrs-ctu/trajectory_loader will be input to the current reference tracker, which will generate all-state and feasible reference for the controller.
Generating trajectories from paths
You can generate your own trajectories and publish them to control_manager/trajectory_reference to fly them (see UAV-ROS interface). This pipeline follows the same scheme trajectory->tracker->controller as if the trajectory was loaded with mrs-ctu/trajectory_loader. If a trajectory is not feasible under dynamic constraints for the UAV, the resulting trajectory may be degraded.
To convert a desired waypoint path to a trajectory feasible under dynamic constraints of the UAV, you can use the mrs_uav_trajectory_generation package. See the package documentation for more information about generating trajectories under dynamic constraints and list of topics/services for using the mrs_uav_trajectory_generation package.