Prerequsities
- The ROS Noetic installed.
- The MRS UAV Core installed.
Starting the simulation
Running the simulation consists of several steps, which are automated using a tmuxinator script. Examples of tmuxinator files can be found in the tmux folder within the mrs_multirotor_simulator package. With the system installed, you can find them (and then copy them elsewhere) by running
roscd mrs_multirotor_simulator/tmux
Each folder contains a different simulation scenario.
The simlation scenario will be started by calling the start.sh script within its folder. This will call the tmuxinator utility that uses the prescription in the session.yml file to spawn a tmux session.
roscd mrs_multirotor_simulator/tmux/standalone
./start.sh
You should be presented with the “Rviz” window upon starting the session. 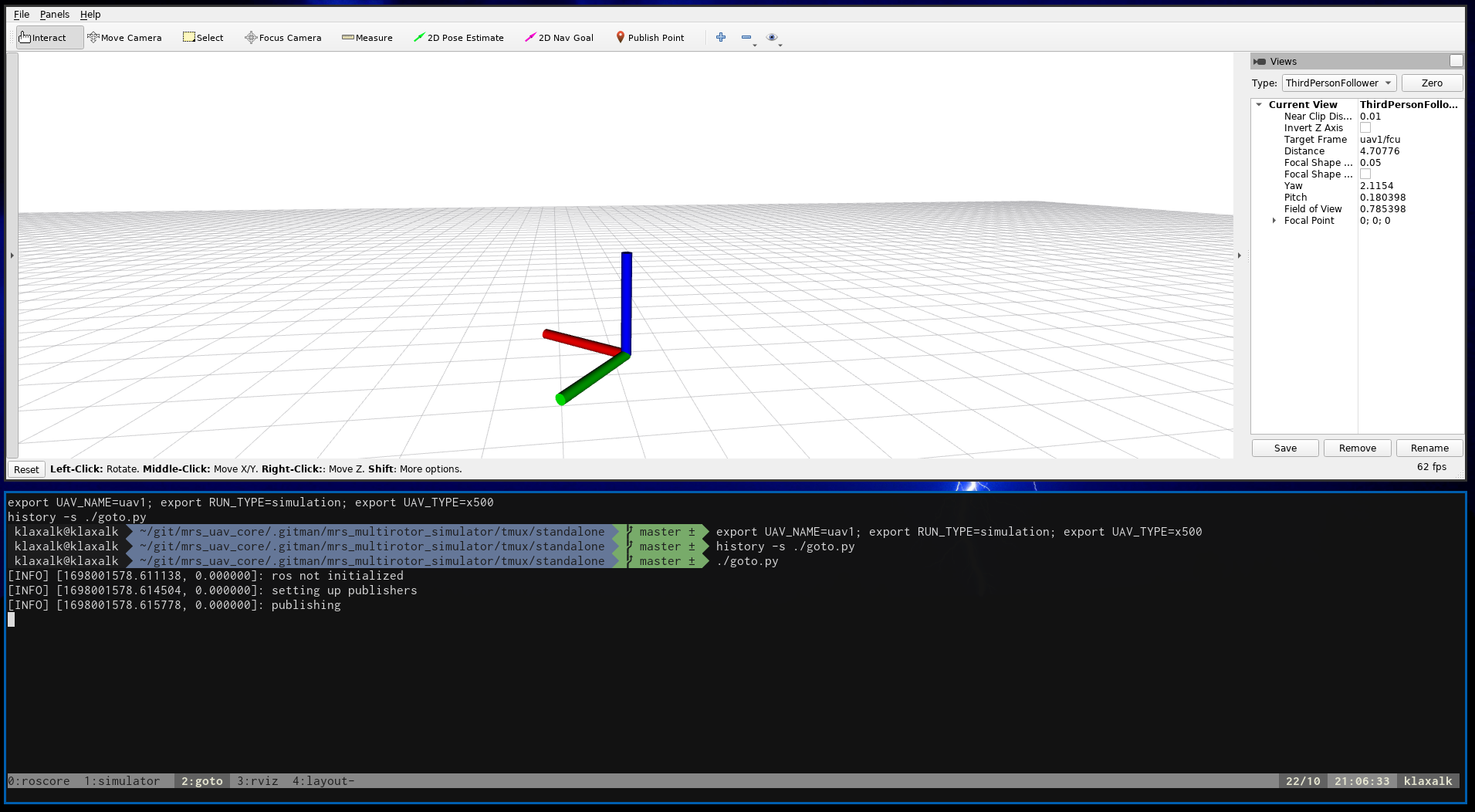
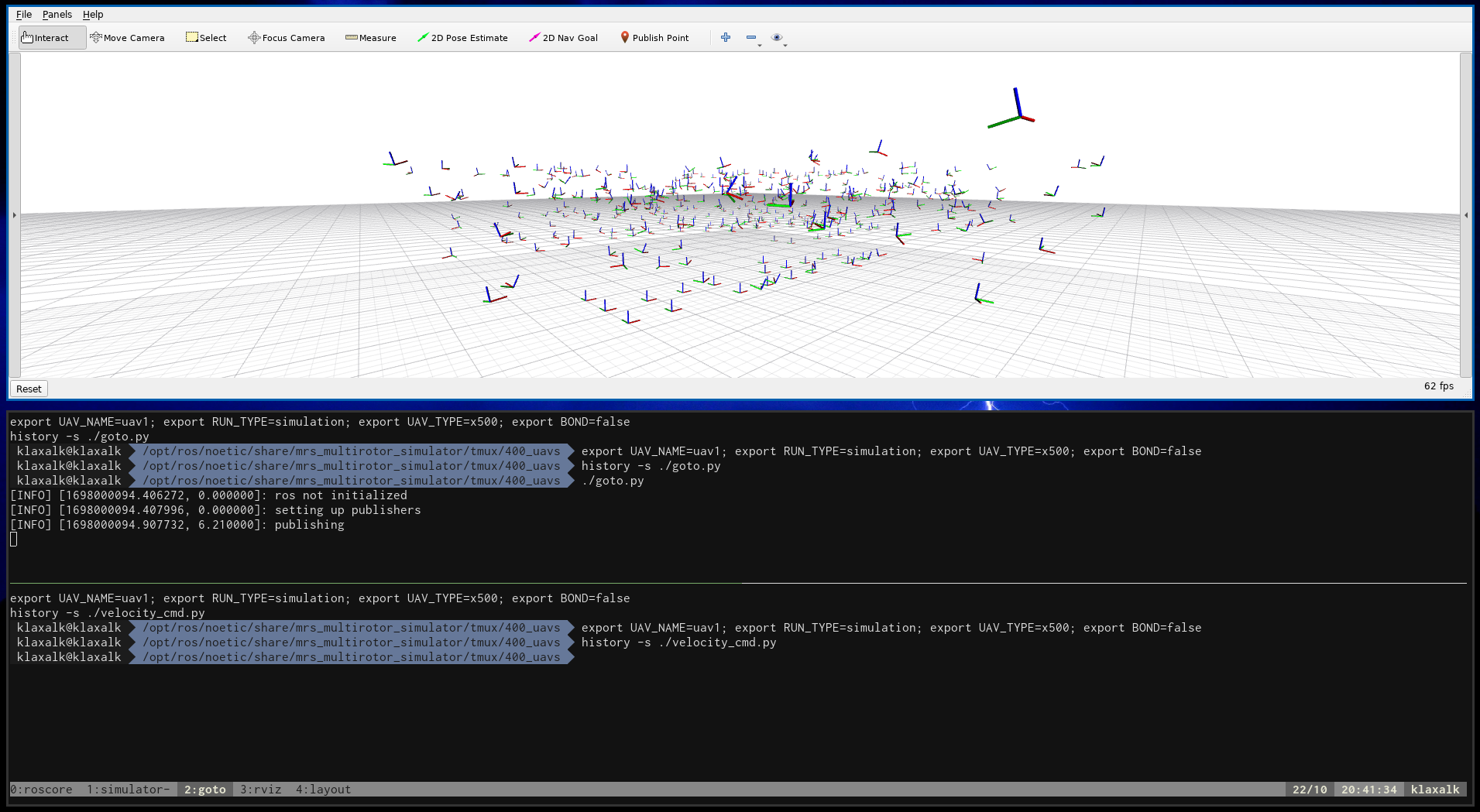
A similar session was also prepared to showcase the simulator of large number (400) of UAVs:
roscd mrs_multirotor_simulator/tmux/standalone_400_uavs
./start.sh
Stopping the simulation
You have two options:
a) Run the ./kill.sh script. b) Hit the killing shortcut: ctrl+a k (ctrl+a and then k). A menu will appear in which you confirm the selection.
Configuring the simulator
The simulator is configure through a custom config file here which contains the differences form the default simulator config file. You can configure how many drones should be spawned, of which type and where. The particular drone models are configure here.