|
|
|---|
| The MRS UAV System 1.5 is being released and this page needs updating. Please, keep in mind that the information on this page might not be valid. |
Prerequsities
- The ROS Noetic installed.
- The MRS UAV System installed.
- The MRS UAV Coppelia Simulation installed.
Starting the simulation
Running the simulation consists of several steps, which are automated using a tmuxinator script. Examples of tmuxinator files can be found in the tmux folder within the mrs_uav_coppelia_simulation package. With the system installed, you can find it (and then copy it elsewhere) by running
roscd mrs_uav_coppelia_simulation/tmux
The simlation scenario will be started by calling the start.sh script within its folder. This will call the tmuxinator utility that uses the prescription in the session.yml file to spawn a tmux session.
roscd mrs_uav_coppelia_simulation/tmux
./start.sh
When the CoppeliaSim window appears, click on the “play” button to start/resume the simulation. Then, the MRS UAV System will start and RViz window will appear. 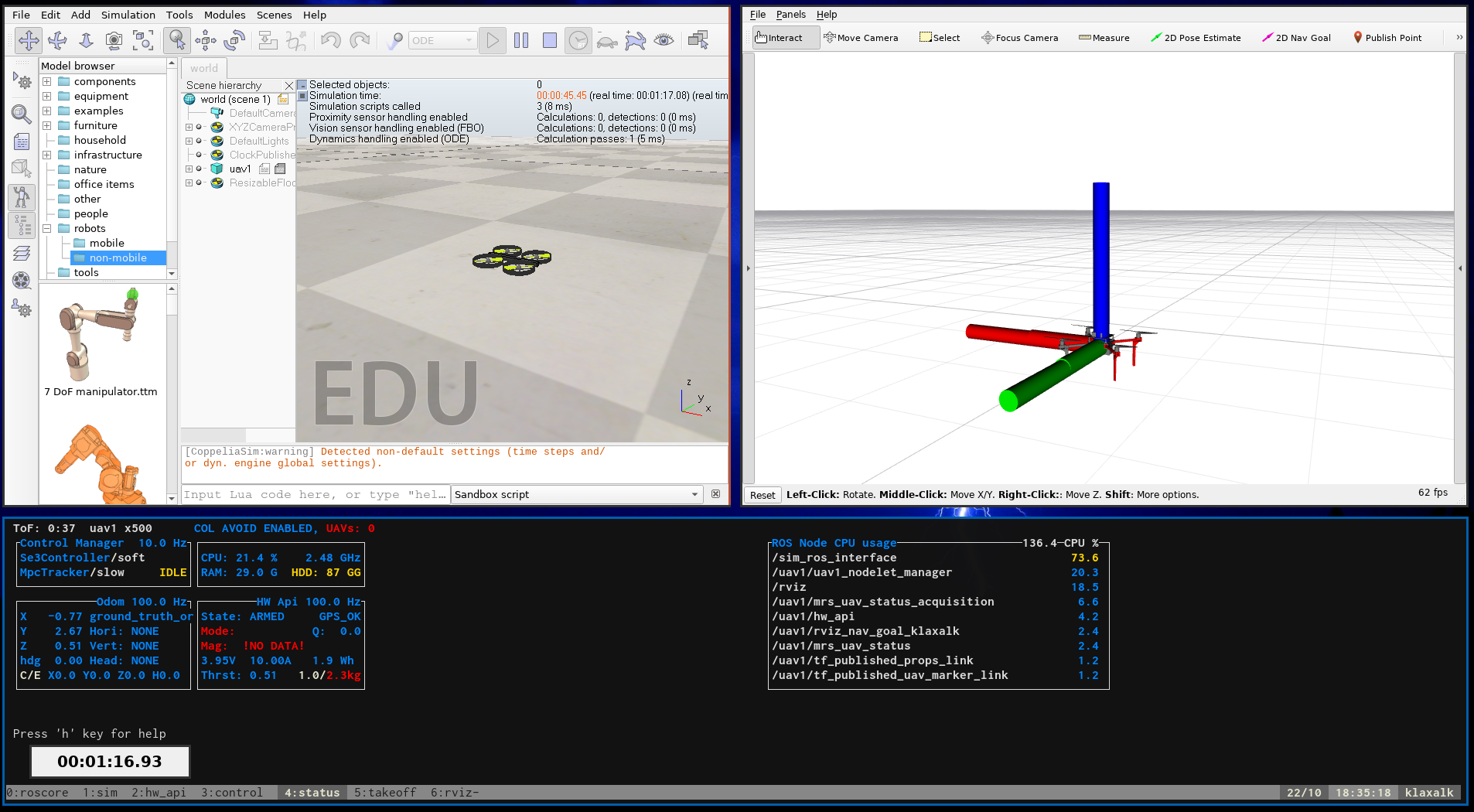
Stopping the simulation
You have two options:
a) Run the ./kill.sh script. b) Hit the killing shortcut: ctrl+a k (ctrl+a and then k). A menu will appear in which you confirm the selection.
How does it work?
For more details, see the mrs_uav_coppelia_simulation repository.