|
|
|---|
| The MRS UAV System 1.5 is being released and this page needs updating. Please, keep in mind that the information on this page might not be valid. |
Frames of Reference
As described in the Transformations manual, the MRS control system enables to send commands to the UAV in all coordinate frames that are part of the same TF Tree as the <uav_name>/fcu frame. The <uav_name>/fcu frame is the body frame of the UAV. The coordinate frames that are used within MRS system are listed below.
The graphical illustration of relations among particular frames can be displayed with rqt utility tf_tree by executing command:
rosrun rqt_tf_tree rqt_tf_tree
or using the main RQT application:
rqt
Multi-frame Localization Problem
Coordinate systems for mobile robots follow hierarchical convention (check coordinate frames convention REP-105 used with ROS):
world -> map -> odometry -> fcu -> sensors
The transformations (->) among coordination frames are maintained by tf2 ROS library. The tf2 library requires the mutual transformations to be stored in a tree structure, where each node has a single parent and there exists only a single root node with no parent.
But, maintaining the tree structure is impossible for multiple world/map/odometry coordinate frames.
The MRS system solves this by having the <uav_name>/fcu coordinate frame as the root node of the tree. A frame following the hierarchical order <uav_name>/fcu -> frame is kept untouched. However, a frame following the order frame -> <uav_name>/fcu is stored as a children of <uav_name>/fcu by inverting the order and the transformation. 
Connecting multiple TF trees
To connect transform trees of two or more UAVs, you can use the tf_connector node within the mrs_utils package. The node creates a new common connecting frame and defines transforms from root frames of the separate trees to this common frame that are recalculated so that the specified frames in the subtrees remain equal. See the corresponding Readme for usage hints and parameter documentation.
Note: The tf_connector node can connect only trees containing a common (equal) frame — e.g., a local GNSS coordinate frame of the world <uav_name>/world_origin.
Elementary frames
The most important frames, that are used in MRS system and are automatically created for each UAV, are:
-
<uav_name>/fcu
- Flight Controller Unit coordinate frame, a.k.a., the body frame of the UAV
- z-axis is parallel to the thrust force produced by the propellers
-
<uav_name>/fcu_untilted
- coordinate frame with coincident center and orientation with the
<uav_name>/fcuframe, but xy-plane parallel to xy-plane of of the world. - enables commanding UAV in the
<uav_name>/fcuframe without being affected by the UAV tilt
- coordinate frame with coincident center and orientation with the
-
<uav_name>/local_origin
- coordinate frame with center and orientation cooincident with the starting point and orientation of the UAV
-
<uav_name>/fixed_origin
- coordinate frame with center and orientation cooincident with the starting estimator
-
<uav_name>/stable_origin
- coordinate frame used for stable odometry, which does not jump when a state estimator is switched
-
<uav_name>/world_origin
- coordinate frame representing the GNSS-based frame with origin defined in the world file
- enables commanding multiple UAVs in a common locally-defined coordinate frame
-
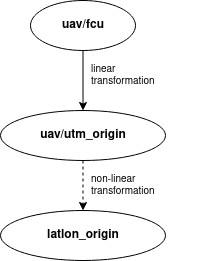
<uav_name>/utm_origin
- coordinate frame representing the UTM coordinates with UTM zone derived from the current GNSS data
- enables commanding multiple UAVs in a Earth-based coordinate frame
- allows use of software that might expect UTM coordinates
- points with
header.frame_idas <uav_name>/utm_origin have the following meaning-
x: easting -
y: northing -
z: height above mean sea level (AMSL)
-
where the <uav_name> is the unique name of a UAV.
Sensor frames
In addition to elementary frames, that are automatically created for each UAV, coordinate frames of sensors are created according to configuration of particular UAVs specified in a spawn command. The sensor frames includes
- <uav_name>/garmin
- <uav_name>/rplidar
- <uav_name>/os1_sensor
- <uav_name>/bluefox_front
- …
Additional frames
Last group of frames used in MRS system is formed by coordinate frames created by TransformManager from nav_msgs/Odometry messages or by addditional sotware (e.g., systems for localization). This group incorporates
- <uav_name>/mapping_origin
- <uav_name>/ground_truth
- <uav_name>/vio_origin
- …
Special LATLON frame
The geographical location of object and robots is often represented using latitude, longitude and altitude (above mean sea level). Due to the curved nature of the Earth’s surface, the transformation between the latitude-longitude coordinates and a Cartesian coordinate system (all the above frames) is non-linear in nature. These non-linear transformations are not part of the tf tree maintianed by the tf2 library. However, the MRS system includes methods to perform transformations and can work with msgs/commands containing latitude-longitude information. Any msg/command having the following structure is accepted by the MRS system.
-
frame_id: latlon_origin -
x: latitude in degrees -
y: longitude in degrees -
z: height above mean sea level (AMSL)