Custom configs for containers
Problem definition
A users has a docker image from which his software can be started. The image contains pre-compiled binaries with a default configuration. However, in many cases (robotics applications), the user's software needs to be started with different configuration each time. Configuration can be facilited by several mechanisms:
- config files,
- ROS launch files,
- shell scripts,
- additional files loaded in runtime.
There are two ways how to provide custom configuration files to the system:
- expose them to the container runing from the user's docker image
- paste them as a part of the compose.yaml file directly from the Portainer
Solution 1. - Through docker image
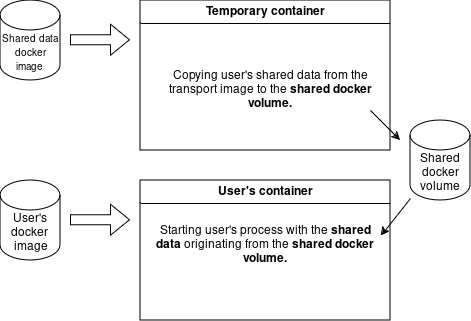
We pack the configurations (shared data) in a dedicated transport image which is easily delivered to the robot. Then, during runtime, this image spawns a container in which the data is coppied to a shared docker volume. Then, the user's containers are started, all mounting the same shared docker volume and accessing the configuration data.
Packing shared data to a transport image
The following minimalistic dockerfile coppies the shared_data subfolder in the transport docker image:
FROM alpine
COPY shared_data/ /etc/docker/shared_data/
CMD ["sh"]
Build the image using the following command.
Select the appropriate tag and platform.
docker build build . --file Dockerfile --tag <shared_data_image_tag> --platform=linux/<my_platform>
Unloading the shared data from the transport image
The following compose session shows the process of unloading the shared data.
The user_program can then access the files in the shared docker volume.
volumes:
shared_data:
services:
# will copy session-specific data shared between containers from the shared_data container to a shared volume
copy_shared_data:
image: <shared_data_image_tag>
volumes:
- shared_data:/tmp/docker/shared_data:consistent
tty: true
command: sh -c "rm -rvf /tmp/docker/shared_data/*; mkdir -pv /tmp/docker/shared_data; cp -rv /etc/docker/shared_data/* /tmp/docker/shared_data/"
user_program:
image: <users_base_image>
depends_on:
- copy_shared_data
volumes:
- shared_data:/etc/docker/shared_data:consistent
command: my_process /etc/docker/shared_data/config_file.txt
Solution 2. - Inline, through compose.yaml from Portainer
When you are starting the system from the Portainer using Docker Compose, you can past the yaml config directly to the compose.yaml file. Example:
services:
realsense:
image: ctumrs/realsense
#build: .
privileged: true
network_mode: "host"
configs:
- source: cfg_yaml
target: /custom_config.yaml
mode: 0444 # read-only permissions
command: custom_config:=/custom_config.yaml
configs:
cfg_yaml:
content: |
/uav1/rgbd:
ros__parameters:
remappings:
'~/depth/image_rect_raw': ~/depth/image_raw
'~/depth/image_rect_raw/compressed': ~/depth/image_raw/compressed
'~/depth/image_rect_raw/compressedDepth': ~/depth/image_raw/compressedDepth
aligned_depth_to_color:
image_raw:
compressed:
format: jpeg
This is compose.yaml for starting Docker container for the Realsense camera. Configuration in the yaml format is under the configs section, in the content subsection. This content is copied into the file specified in the service section, in the configs/target subsections - /custom_config.yaml. It is then passed to the ROS2 launchfile through command subsection. The user only needs to modify the configs section.