This page is describing the upcoming ROS2 version of the MRS UAV System (however, it may be still outdated). If you are looking for ROS1 version of the docs, follow to https://ctu-mrs.github.io/docs/1.5.0/introduction/.
Prerequsities
- The ROS Jazzy installed.
- The MRS UAV System installed.
- The MRS UAV Gazebo Simulator installed.
Starting the simulation
Running the simulation consists of several steps, which are automated using a tmuxinator script.
Examples of tmuxinator files can be found in the tmux folder within the mrs_uav_gazebo_simulator package. With the system installed, you can find them (and then copy them elsewhere) by running
cd /opt/ros/jazzy/share/mrs_uav_gazebo_simulator/tmux
The simulation scenario will be started by calling the start.sh script within its folder.
This will call the tmuxinator utility that uses the prescription in the session.yml file to spawn a tmux session.
cd /opt/ros/jazzy/share/mrs_uav_gazebo_simulator/tmux/one_drone
./start.sh
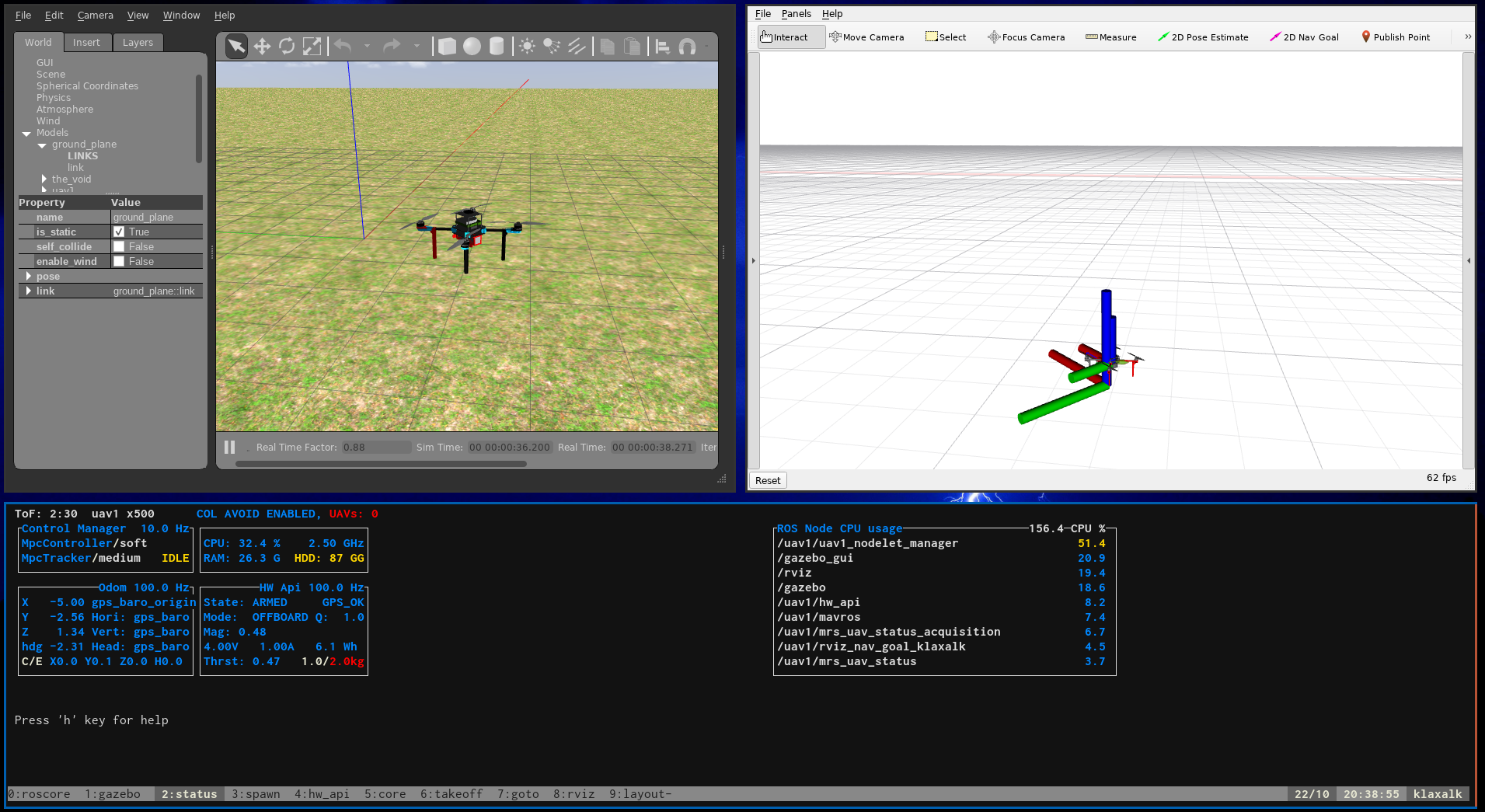
You should be presented with the windows of the "Gazebo simulator" and the "Rviz" upon starting the session.
Stopping the simulation
You have two options:
a) Run the ./kill.sh script.
b) Hit the killing shortcut: ctrl+a k (ctrl+a and then k). A menu will appear in which you confirm the selection.
Configuring the UAV
The UAVs are not part of the simulation world, but are spawned dynamically after the world has started.
The spawning is handler by a ROS node mrs_drone_spawner that can introduce new UAVs into the world based on user's command.
The properties of the drones are defined within the session.yml on the line
waitForGazebo; sleep 5; ros2 service call /mrs_drone_spawner/spawn mrs_msgs/srv/String "{value: '1 --$UAV_TYPE --enable-rangefinder'}"
See the drone spawner documentation page for details on how to modify the drone configurations.