Example stacks
Stacks are docker compose sessions within portainer. As in vanilla docker, stacks are defined by a compose file.
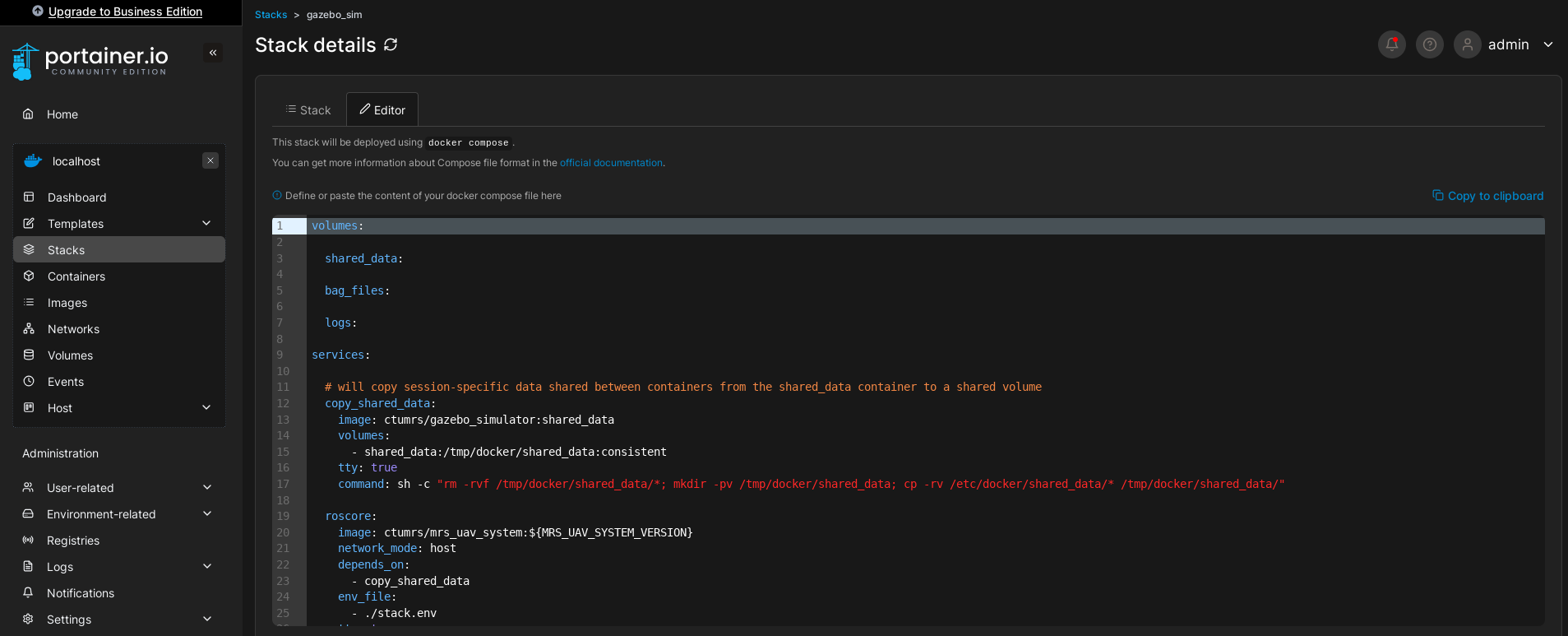
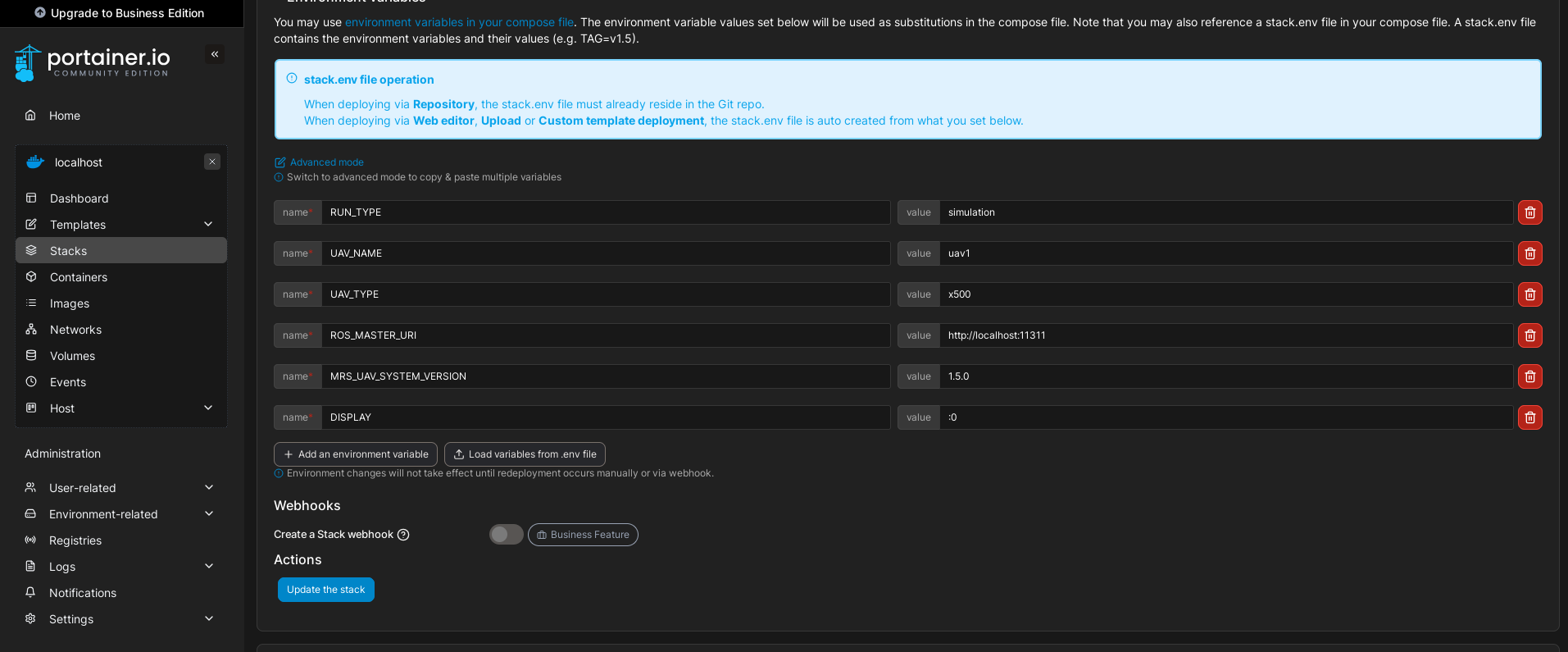
Moreover, a set of environment varibles is defined by hand in Portainer, which can define how the session behave.
Example simulation session
An example simulation session is located at mrs_docker/tree/master/compose/1.5.0/portainer.
Custom configs (and other shared data for all the running containers) for the MRS UAV System are supposed to be packed into a transport docker image.
The subfolder shared_data containes the example shared data and scripts for build an image that is going to unload the configs during the runtime for the running containers.
Compose file
volumes:
shared_data:
bag_files:
logs:
services:
# will copy session-specific data shared between containers from the shared_data container to a shared volume
copy_shared_data:
image: ctumrs/gazebo_simulator:shared_data
volumes:
- shared_data:/tmp/docker/shared_data:consistent
tty: true
command: sh -c "rm -rvf /tmp/docker/shared_data/*; mkdir -pv /tmp/docker/shared_data; cp -rv /etc/docker/shared_data/* /tmp/docker/shared_data/"
roscore:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
depends_on:
- copy_shared_data
env_file:
- ./stack.env
tty: true
command: roscore
gazebo_simulator:
depends_on:
- roscore
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
# mount the folders below to enable passing GUI to the host
- /dev/dri:/dev/dri
- /tmp/.X11-unix:/tmp/.X11-unix
env_file:
- ./stack.env
environment:
DISPLAY: $DISPLAY
tty: true
command: bash -c "waitForRos && roslaunch mrs_uav_gazebo_simulation simulation.launch world_name:=grass_plane gui:=true"
spawn:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c 'waitForGazebo; rosservice call /mrs_drone_spawner/spawn "1 --$$UAV_TYPE --enable-rangefinder"'
hw_api:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForTime && roslaunch mrs_uav_px4_api api.launch"
uav_core:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForHw && roslaunch mrs_uav_core core.launch platform_config:=`rospack find mrs_uav_gazebo_simulation`/config/mrs_uav_system/$$UAV_TYPE.yaml custom_config:=/etc/docker/shared_data/custom_config.yaml world_config:=/etc/docker/shared_data/world_config.yaml network_config:=/etc/docker/shared_data/network_config.yaml"
automatic_start:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForHw && roslaunch mrs_uav_autostart automatic_start.launch custom_config:=/etc/docker/shared_data/automatic_start.yaml"
# starts `rosbag record`
rosbag:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- bag_files:/etc/docker/bag_files:consistent
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForTime && /etc/docker/shared_data/record.sh"
takeoff:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForControl && rosservice call /uav1/hw_api/arming 1 && sleep 1 && rosservice call /uav1/hw_api/offboard"
rviz:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
# mount the folders below to enable passing GUI to the host
- /dev/dri:/dev/dri
env_file:
- ./stack.env
environment:
DISPLAY: $DISPLAY
tty: true
command: bash -c "waitForHw && roslaunch mrs_uav_core rviz.launch"
rviz_interface:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- roscore
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
# mount the folders below to enable passing GUI to the host
- /dev/dri:/dev/dri
env_file:
- ./stack.env
environment:
DISPLAY: $DISPLAY
tty: true
command: bash -c "waitForHw && roslaunch mrs_rviz_plugins rviz_interface.launch"
dogtail:
image: klaxalk/dogtail:latest
volumes:
- /var/run/docker.sock:/var/run/docker.sock
- logs:/etc/logs:consistent
# this container can be used to access a terminal with ROS inside the compose session
terminal:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
env_file:
- ./stack.env
entrypoint: ["/bin/bash", "-c"]
volumes:
- shared_data:/etc/docker/shared_data:consistent
- bag_files:/etc/docker/bag_files:consistent
- /dev/:/dev/
- /tmp/.X11-unix:/tmp/.X11-unix
command:
- bash --rcfile /opt/ros/noetic/setup.bash
privileged: true
stdin_open: true
tty: true
Environment variables
RUN_TYPE=simulation
UAV_NAME=uav1
UAV_TYPE=x500
ROS_MASTER_URI=http://localhost:11311
MRS_UAV_SYSTEM_VERSION=1.5.0
DISPLAY=:0
Example realworld UAV session
An example realworld session is located at mrs_docker/tree/master/compose/1.5.0/portainer.
Custom configs (and other shared data for all the running containers) for the MRS UAV System are supposed to be packed into a transport docker image.
The subfolder shared_data containes the example shared data and scripts for build an image that is going to unload the configs during the runtime for the running containers.
Compose file
volumes:
shared_data:
bag_files:
logs:
services:
# will copy session-specific data shared between containers from the shared_data container to a shared volume
copy_shared_data:
image: shared_data_gnss
volumes:
- shared_data:/tmp/docker/shared_data:consistent
tty: true
command: sh -c "rm -rvf /tmp/docker/shared_data/*; mkdir -pv /tmp/docker/shared_data; cp -rv /etc/docker/shared_data/* /tmp/docker/shared_data/"
# starts roscore
# this is the first container in the ROS pipeline
roscore:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
depends_on:
- copy_shared_data
env_file:
- ./stack.env
tty: true
command: roscore
# after roscore is started
# -> set a parameter that tells the system that simulation time is NOT used
# this container then stops
rostime:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
depends_on:
- roscore
env_file:
- ./stack.env
tty: true
command: bash -c "waitForRos && rosparam set use_sim_time false"
# starts the HW API for connecting the MRS UAV System to PX4
hw_api:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- rostime
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
- /dev/:/dev/
privileged: true
env_file:
- ./stack.env
tty: true
command: bash -c "waitForTime && roslaunch mrs_uav_px4_api api.launch"
# starts the MRS UAV System's core
uav_core:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- rostime
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForHw && roslaunch mrs_uav_core core.launch platform_config:=`rospack find mrs_uav_deployment`/config/mrs_uav_system/${UAV_TYPE}.yaml custom_config:=/etc/docker/shared_data/custom_config.yaml world_config:=/etc/docker/shared_data/world_local.yaml network_config:=/etc/docker/shared_data/network_config.yaml"
# starts the node that handles automatic initialization of the system and takeoff
automatic_start:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- rostime
network_mode: host
volumes:
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForHw && roslaunch mrs_uav_autostart automatic_start.launch"
# starts `rosbag record`
rosbag:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
depends_on:
- rostime
network_mode: host
volumes:
- bag_files:/etc/docker/bag_files:consistent
- shared_data:/etc/docker/shared_data:consistent
env_file:
- ./stack.env
tty: true
command: bash -c "waitForTime && /etc/docker/shared_data/record.sh"
rosbridge:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
env_file:
- ./stack.env
tty: true
command: bash -c "waitForRos && roslaunch rosbridge_server rosbridge_websocket.launch"
dogtail:
image: klaxalk/dogtail:latest
volumes:
- /var/run/docker.sock:/var/run/docker.sock
- logs:/etc/logs:consistent
# this container can be used to access a terminal with ROS inside the compose session
terminal:
image: ctumrs/mrs_uav_system:${MRS_UAV_SYSTEM_VERSION}
network_mode: host
depends_on:
- rostime
env_file:
- ./stack.env
entrypoint: ["/bin/bash", "-c"]
volumes:
- bag_files:/etc/docker/bag_files:consistent
- shared_data:/etc/docker/shared_data:consistent
- /dev/:/dev/
command:
- bash --rcfile /opt/ros/noetic/setup.bash
privileged: true
stdin_open: true
tty: true
Environment variables
RUN_TYPE=realworld
UAV_NAME=uav80
UAV_TYPE=x500
ROS_MASTER_URI=http://localhost:11311
UAV_MASS=2.0
MRS_UAV_SYSTEM_VERSION=1.5.0