MRS VINS republisher
Transformes the VIO odometry to the reference frame expected by the EstimationManager.
Usage
Use one of the launch files in the launch/ folder, for example:
ros2 launch mrs_vins_republisher vins_republisher.launch.py
or create your own by copying an existing launch file and modifying the transformations.
How it works
When we have multiple sources of the localization (GPS, VIO, SLAM...), each source's node publishes its own TF tree representing position (and possibly other state variables) of the drone in the world frame according to that particular localization source. Thus we should have TF tree with multiple root nodes. However, in ROS, we cannot have multiple roots. We solve this by appending the TF tree of each localization source under the main TF tree.
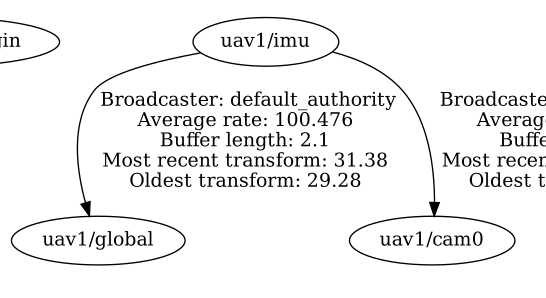
If we run the OpenVINS VIO node, it publishes its own tf tree, which is separated from the "main" tf tree:

The "main" TF tree has the uav1/fcu frame at its root. The root of the TF tree output by OpenVINS is uav1/imu. Here is the detail of the TF tree produced by OpenVINS:
We have to connect those two TF trees together. Here is the complete, connected TF tree:
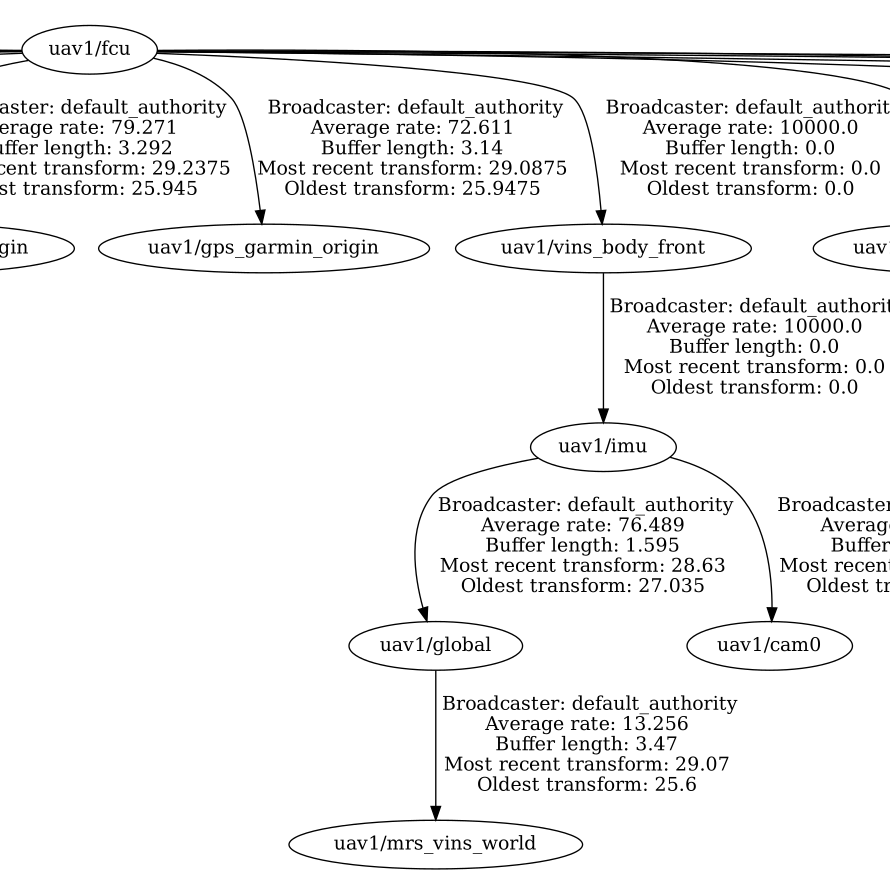
We added static TF frame uav1/vins_body_front under the uav1/fcu. This transform represents position of the camera relative to the FCU frame, a.k.a. camera mounting position/orientation. Another static TF frame is uav1/imu (connected to the uav1/vins_body_front), which OpenVINS is using as its UAV body frame. OpenVINS is publishing the transform between uav1/imu and uav1/global, which is the actual localization.
Node mrs_vins_republisher is publishing transform from uav1/global to uav1/mrs_vins_world. Those two frames have identical position but different orientation.
Description of the TF frames
vins_body_front: Represents the pose of the mounting point of the camera. This is static frame.imu: OpenVINS uses this frame as its "fcu" frame.global: This the pose of theimuframe estimated by the OpenVINS.cam0: This frame represents image frame of the camera.mrs_vins_world: This frame is created by the MRS Vins Republisher. It is used as the actual localization according to the OpenVINS. When the system is started, this frame should be identical to the world frame. As the UAV is moving and OpenVINS is doing its job, it starts to slowly deviate from the world frame, expressing the drift of the VIO algorithm (if the ground truth world frame is available, like in the simulaton).