warning
This page is describing the upcoming ROS2 version of the MRS UAV System (however, it may be still outdated). If you are looking for ROS1 version of the docs, follow to https://ctu-mrs.github.io/docs/1.5.0/introduction/.
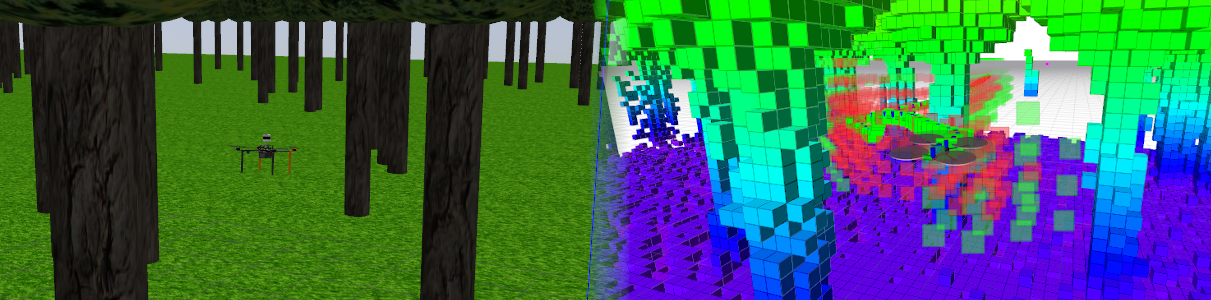
Octomap mapping & planning
📄️ Planner
Octomap planner
📄️ Server
Octomap Server
3D volumetric mapping based on Octomap + A*-based planning
Dependencies
Packages
- mrs_octomap_mapping_planning - launch files, example tmux session
- mrs_octomap_server - Uses Octomap to build global & local map
- mrs_octomap_planner - 3D planner for UAVs
- mrs_octomap_tools - MRS Tools and libraries for Octomap
- mrs_subt_planning_lib - 3D A*-based planner utilized by mrs_octomap_planner
Example simulation session
Example tmuxinator session is provided in the tmux subfolder.
Main launch file
The launch file
ros2 launch mrs_octomap_mapping_planning mapplan.launch.py
was prepared to utilize 3D LiDAR and depth camera data and to launch:
- PointCloud filter (mrs_pcl_tools),
- Octomap Server,
- Octomap Planner,
- Octomap RVIZ Visualizer,
- Nodelet manager.
To use the launch file for your specific usecase, you might need to:
- Specify reference frame of the map in the world_frame_id argument.
- Provide custom configs customizing the behavior of the PCL filters, octomap server, octomap planner, and octomap visualizer.
- Remap ROS topics expected by the launch file to correspond to your sensor configuration.
Example usage of the launch file with custom configs provided:
ros2 launch mrs_octomap_mapping_planning mapplan.launch.py config_octomap_server:="./config/octomap.yaml" world_frame_id:="$UAV_NAME/mapping_origin" config_octomap_visualizer:="./config/octomap_rviz_visualizer.yaml" config_octomap_planner:="./config/pathfinder.yaml" config_pcl_filter_ouster:="./config/pcl_filter_mapping.yaml"