This page is describing the upcoming ROS2 version of the MRS UAV System (however, it may be still outdated). If you are looking for ROS1 version of the docs, follow to https://ctu-mrs.github.io/docs/1.5.0/introduction/.
The MRS Hardware API interface
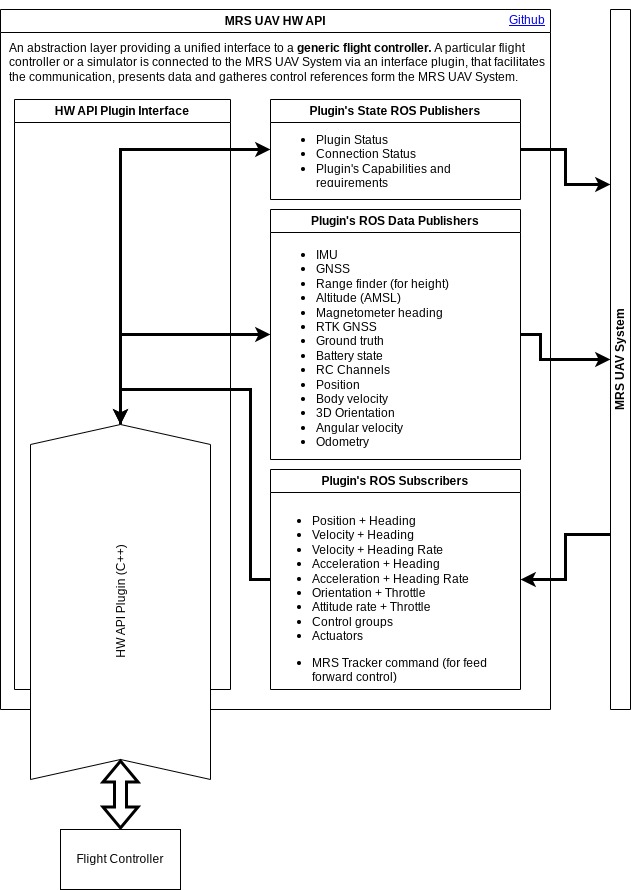
The HW API provides an abstraction layer between the MRS UAV System and a UAV flight controller. On one side, the HW API provides a unified ROS interfaces for the core as if it was a generic flight controller. On the other side, the communication with a particular hardware (or simulator) can be orchestrated using whatever is required. The HW API is defined by the package mrs_uav_hw_api, which is part of the mrs_uav_core.
Doxygen documentation for the C++ API
Control output from the MRS UAV System
The control output can be any of the following:
- 3D Position + Heading
- 3D body-frame Velocity + Heading
- 3D body-frame Velocity + Heading rate
- 3D body-frame Acceleration + Heading
- 3D body-frame Acceleration + Heading rate
- 3D world-frame Attitude + Throttle
- body-frame Attitude rate + Throttle
- Control groups
- individual Actuators' throttle
The following services command the state changes in the flight controller:
- Arming toggle service
- Offboard trigger service
Data provided to the MRS UAV System
The following data can be provided by the API plugin
- GNSS
- GNSS data
- GNSS status
- RTK
- IMU
- Barometer
- Magnetometer heading
- Magnetometer's magnetic field
- Downwards-pointed rangefinder (height)
- AMSL altitude
- Position
- Velocity
- Orientation
- Angular velocity
- Ground truth
- RC Channels
- Battery state
- 3D odometry