This page is describing the upcoming ROS2 version of the MRS UAV System (however, it may be still outdated). If you are looking for ROS1 version of the docs, follow to https://ctu-mrs.github.io/docs/1.5.0/introduction/.
The Controller plugin interface
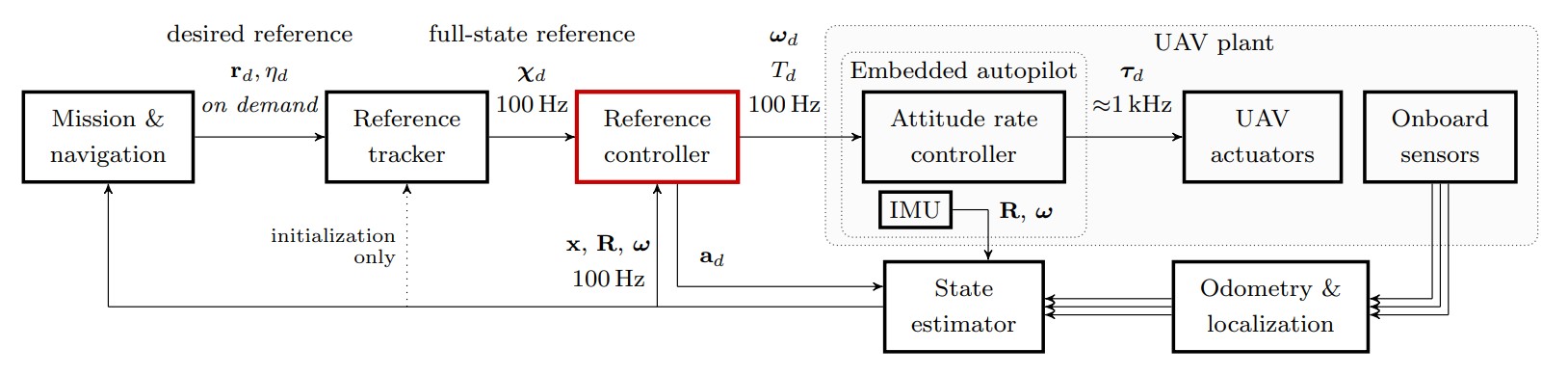
The Controller plugin takes current UAV state and command from the Reference tracker and provides the desired control outputs, which are sent to the flight controller (Embedded autopilot block in diagram below) via the Hardware API. The diagram below shows the data architecture of the MRS system where the block containing the Controller plugin is marked in red.
The controller plugin is compiled as ROS plugins with the interface defined by the control manager. A controller plugin from any ROS package can be loaded dynamically by the control manager without it being present during control manager's compile time. Loaded controllers can be switched by the control manager in mid-flight, which allows safe testing of new controllers and adds flexibility to the MRS UAV system.
Controller plugin - outputs
The controller plugin can output any of the following control outputs:
- individual Actuators' throttle
- Control groups
- body-frame Attitude rate + Throttle
- 3D world-frame Attitude + Throttle
- 3D body-frame Acceleration + Heading rate
- 3D body-frame Acceleration + Heading
- 3D body-frame Velocity + Heading rate
- 3D body-frame Velocity + Heading
- 3D Position + Heading
In the controller plugin source code, you can decide what to return, but it must be available in Hardware API.
Example controller plugin
An example of a custom controller plugin can be found at this link. It is highly recommended to base your controller plugin on this example. In the example, there is also a tmux folder containing a script that starts the simulation of a UAV in the MRS multirotor simulator, where the UAV uses the example controller plugin. You have to install MRS UAV system first to run the example. To load the controller plugin into the MRS UAV system, you need to provide a custom config file to the MRS UAV Core containing the parameters for the controller plugin. The custom config file should contain the following lines (taken from custom config file of example controller plugin):
mrs_uav_managers:
control_manager:
ExampleController:
address: "example_controller_plugin/ExampleController"
namespace: "example_controller"
eland_threshold: 20.0 # [m], position error triggering eland
failsafe_threshold: 30.0 # [m], position error triggering failsafe land
odometry_innovation_threshold: 1.5 # [m], position odometry innovation threshold
human_switchable: true
# which outputs the controller can provide
outputs:
actuators: false
control_group: false
attitude_rate: false
attitude: true
acceleration_hdg_rate: false
acceleration_hdg: false
velocity_hdg_rate: false
velocity_hdg: false
position: false
# list of names of dynamically loaded controllers
controllers : [
"ExampleController",
]
Parameter description for controller plugin
address: "example_controller_plugin/ExampleController : Specifies the address of the plugin to be loaded into the interface as a controller.
namespace: "example_controller" : Specifies the namespace of the controller as per the package description in the plugin.
eland_threshold: 20.0 # [m] : Specifies the position error in the controller which would trigger the eland, but this doesn't attempt a failsafe landing.
failsafe_threshold: 30.0 # [m] : Usually set to a higher value than the eland_threshold, this triggers the failsafe landing where thrust is reduced below expected hover to allow descend while maintaining level flight.
odometry_innovation_threshold: 1.5 # [m] : Odometry innovation threshold varies between controllers depending on whether they are able to supplement the state estimators such that the internal Kalman innovation of the estimators doesn't exceed a certain value and cause the vehicle to emergency land.
human_switchable: true : Specifies whether the controller can be switched by the user during flight.
outputs : Specifies outputs that the controller can provide.