|
mrs_lib
Various reusable classes, functions and utilities for use in MRS projects
|
|
mrs_lib
Various reusable classes, functions and utilities for use in MRS projects
|
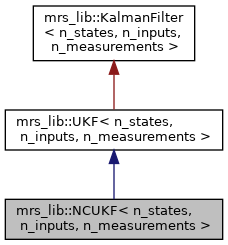
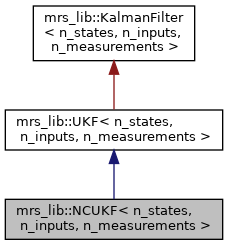
 Inheritance diagram for mrs_lib::NCUKF< n_states, n_inputs, n_measurements >: Collaboration diagram for mrs_lib::NCUKF< n_states, n_inputs, n_measurements >:
Inheritance diagram for mrs_lib::NCUKF< n_states, n_inputs, n_measurements >: Collaboration diagram for mrs_lib::NCUKF< n_states, n_inputs, n_measurements >:Public Types | |
| using | Base_class = UKF< n, m, p > |
| using | x_t = typename Base_class::x_t |
| using | u_t = typename Base_class::u_t |
| using | z_t = typename Base_class::z_t |
| using | P_t = typename Base_class::P_t |
| using | R_t = typename Base_class::R_t |
| using | Q_t = typename Base_class::Q_t |
| using | statecov_t = typename Base_class::statecov_t |
| using | transition_model_t = typename Base_class::transition_model_t |
| using | observation_model_t = typename Base_class::observation_model_t |
| using | X_t = typename Base_class::X_t |
| using | Z_t = typename Base_class::Z_t |
| using | Pzz_t = typename Base_class::Pzz_t |
| using | K_t = typename Base_class::K_t |
| Public Types inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| using | x_t = typename Base_class::x_t |
| state vector n*1 typedef | |
| using | u_t = typename Base_class::u_t |
| input vector m*1 typedef | |
| using | z_t = typename Base_class::z_t |
| measurement vector p*1 typedef | |
| using | P_t = typename Base_class::P_t |
| state covariance n*n typedef | |
| using | R_t = typename Base_class::R_t |
| measurement covariance p*p typedef | |
| using | Q_t = typename Base_class::Q_t |
| process covariance n*n typedef | |
| using | W_t = typename Eigen::Matrix< double, w, 1 > |
| weights vector (2n+1)*1 typedef | |
| using | statecov_t = typename Base_class::statecov_t |
| typedef of a helper struct for state and covariance | |
| using | transition_model_t = typename std::function< x_t(const x_t &, const u_t &, double)> |
| function of the state transition model typedef | |
| using | observation_model_t = typename std::function< z_t(const x_t &)> |
| function of the observation model typedef | |
Public Member Functions | |
| NCUKF (const transition_model_t &transition_model, const observation_model_t &observation_model, const double l, const double alpha=1e-3, const double kappa=1, const double beta=2) | |
| virtual statecov_t | correct (const statecov_t &sc, const z_t &z, const R_t &R) const override |
| Public Member Functions inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| UKF () | |
| Convenience default constructor. | |
| UKF (const transition_model_t &transition_model, const observation_model_t &observation_model, const double alpha=1e-3, const double kappa=1, const double beta=2) | |
| The main constructor. | |
| virtual statecov_t | correct (const statecov_t &sc, const z_t &z, const R_t &R) const override |
| Implements the state correction step (measurement update). | |
| virtual statecov_t | predict (const statecov_t &sc, const u_t &u, const Q_t &Q, double dt) const override |
| Implements the state prediction step (time update). | |
| void | setConstants (const double alpha, const double kappa, const double beta) |
| Changes the Unscented Transform parameters. | |
| void | setTransitionModel (const transition_model_t &transition_model) |
| Changes the transition model function. | |
| void | setObservationModel (const observation_model_t &observation_model) |
| Changes the observation model function. | |
Static Public Attributes | |
| static const int | n = n_states |
| static const int | m = n_inputs |
| static const int | p = n_measurements |
Protected Member Functions | |
| virtual K_t | computeKalmanGain (const x_t &x, const z_t &inn, const K_t &Pxz, const Pzz_t &Pzz) const override |
| Protected Member Functions inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| void | computeWeights () |
| X_t | computeSigmas (const x_t &x, const P_t &P) const |
| P_t | computePaSqrt (const P_t &P) const |
| Pzz_t | computeInverse (const Pzz_t &Pzz) const |
| virtual K_t | computeKalmanGain (const x_t &x, const z_t &inn, const K_t &Pxz, const Pzz_t &Pzz) const |
Protected Attributes | |
| double | l |
| Protected Attributes inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| double | m_alpha |
| double | m_kappa |
| double | m_beta |
| double | m_lambda |
| W_t | m_Wm |
| W_t | m_Wc |
| transition_model_t | m_transition_model |
| observation_model_t | m_observation_model |
Additional Inherited Members | |
| Protected Types inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| using | Base_class = KalmanFilter< n, m, p > |
| Base class of this class. | |
| using | X_t = typename Eigen::Matrix< double, n, w > |
| State sigma points matrix. | |
| using | Z_t = typename Eigen::Matrix< double, p, w > |
| Measurement sigma points matrix. | |
| using | Pzz_t = typename Eigen::Matrix< double, p, p > |
| Pzz helper matrix. | |
| using | K_t = typename Eigen::Matrix< double, n, p > |
| Kalman gain matrix. | |
| Static Protected Attributes inherited from mrs_lib::UKF< n_states, n_inputs, n_measurements > | |
| static constexpr int | n = n_states |
| Length of the state vector of the system. | |
| static constexpr int | m = n_inputs |
| Length of the input vector of the system. | |
| static constexpr int | p = n_measurements |
| Length of the measurement vector of the system. | |
| static constexpr int | w = 2 * n + 1 |
| Number of sigma points/weights. | |