|
mrs_lib
Various reusable classes, functions and utilities for use in MRS projects
|
|
mrs_lib
Various reusable classes, functions and utilities for use in MRS projects
|
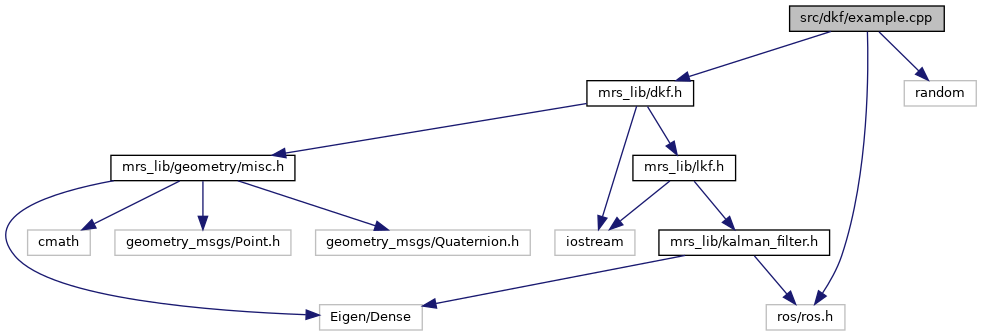
Example file for the DKF implementation. More...
#include <mrs_lib/dkf.h>#include <random>#include <ros/ros.h> Include dependency graph for example.cpp:
Include dependency graph for example.cpp:Classes | |
| struct | obs_t |
Namespaces | |
| mrs_lib | |
| All mrs_lib functions, classes, variables and definitions are contained in this namespace. | |
Typedefs | |
| using | mrs_lib::dkf_t = DKF< n_states, n_inputs > |
| using | A_t = dkf_t::A_t |
| using | B_t = dkf_t::B_t |
| using | H_t = dkf_t::H_t |
| using | Q_t = dkf_t::Q_t |
| using | x_t = dkf_t::x_t |
| using | P_t = dkf_t::P_t |
| using | u_t = dkf_t::u_t |
| using | z_t = dkf_t::z_t |
| using | R_t = dkf_t::R_t |
| using | statecov_t = dkf_t::statecov_t |
| using | pt3_t = dkf_t::pt3_t |
| using | vec3_t = dkf_t::vec3_t |
| using | mat3_t = Eigen::Matrix3d |
Enumerations | |
| enum | x_pos { x_x = 0, x_y = 1, x_z = 2, x_dx = 3, x_dy = 4, x_dz = 5, x_x = 0, x_y = 1, x_dx = 2, x_dy = 3, x_x = 0, x_y = 1, x_alpha = 2, x_x = 0, x_y, x_alpha, x_speed } |
Functions | |
| template<int rows> | |
| Eigen::Matrix< double, rows, 1 > | normal_randmat (const Eigen::Matrix< double, rows, rows > &cov) |
| x_t | tra_model_f (const x_t &x) |
| obs_t | observation (const x_t &x, const double meas_std) |
| int | main () |
Variables | |
| const int | mrs_lib::n_states = 6 |
| const int | mrs_lib::n_inputs = 0 |
| A_t | A |
Example file for the DKF implementation.
This example may be run after building mrs_lib by executing rosrun mrs_lib dkf_example.
See dkf/example.cpp.
 1.8.17
1.8.17