Applies the prediction (time) step of the Kalman filter.
This method applies the linear Kalman filter prediction step to the state and covariance passed in sc using the input u and process noise Q. The process noise covariance Q is scaled by the dt parameter. The updated state and covariance after the prediction step is returned.
Parameters
sc
The state and covariance to which the prediction step is to be applied.
u
The input vector to be used for prediction.
Q
The process noise covariance matrix to be used for prediction.
dt
Used to scale the process noise covariance Q and to generate the state transition and input to state mapping matrices A and \B using the functions, passed in the object's constructor.
Returns
The state and covariance after the prediction step.
Note
Note that the dt parameter is used to scale the process noise covariance Q and to generate the system matrices A or B using the functions, passed in the constructor!
The documentation for this class was generated from the following file:
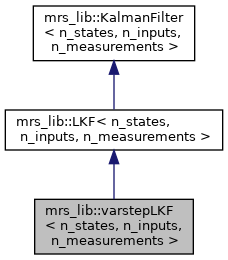
 Inheritance diagram for mrs_lib::varstepLKF< n_states, n_inputs, n_measurements >:
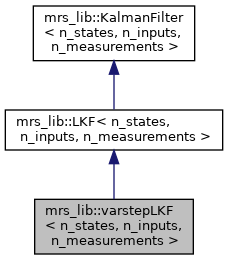
Inheritance diagram for mrs_lib::varstepLKF< n_states, n_inputs, n_measurements >: